转摘BoT-SORT实战:手把手教你实现BoT-SORT训练和测试
文章目录
摘要
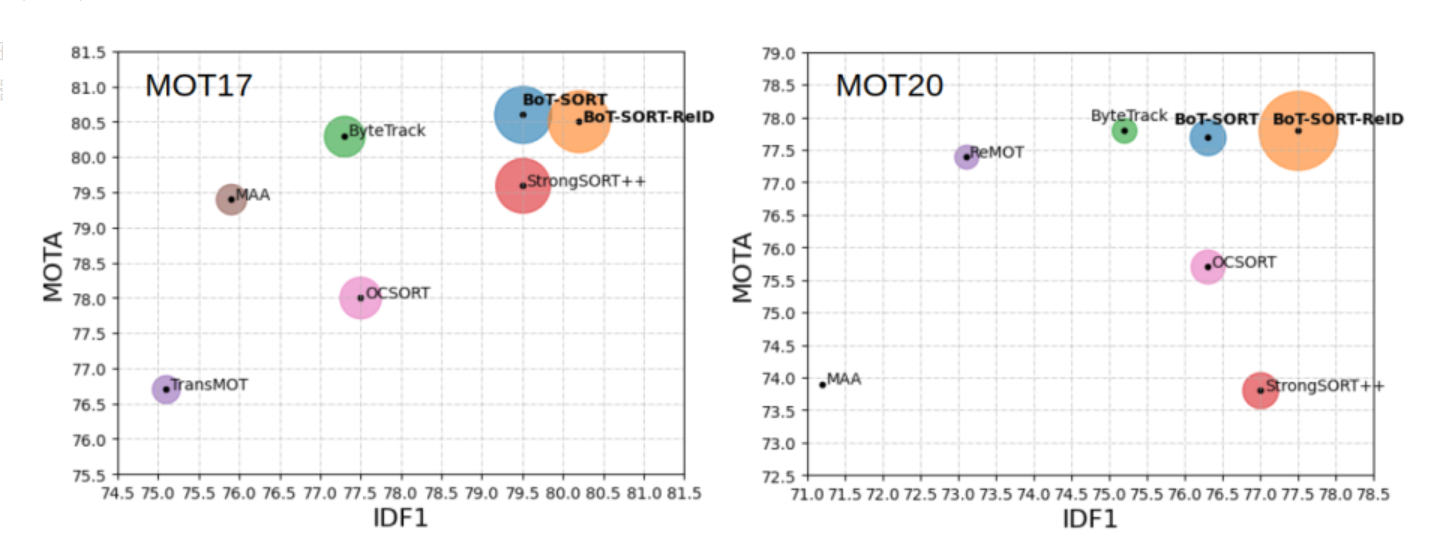
BoT-SORT是今年非常游戏的跟踪器模型。就所有主要 MOT 指标MOTA、IDF1 和 HOTA而言,BoT-SORT 和 BoT-SORT-ReID 在 MOT17 和 MOT20 测试集的 MOTChallenge数据集中排名第一。对于 MOT17:实现了 80.5 MOTA、80.2 IDF1 和 65.0 HOTA,在跟踪器的排行榜上暂居第一。
论文翻译:https://blog.csdn.net/hhhhhhhhhhwwwwwwwwww/article/details/126890651
论文链接:https://arxiv.org/pdf/2206.14651.pdf
代码:https://github.com/NirAharon/BOT-SORT
这篇文章主要讲述如何实现BoT-SORT训练和测试。
1、数据准备
数据,我们使用MOT17和MOT20这两款数据集。下载地址:
官方网站:https://motchallenge.net/
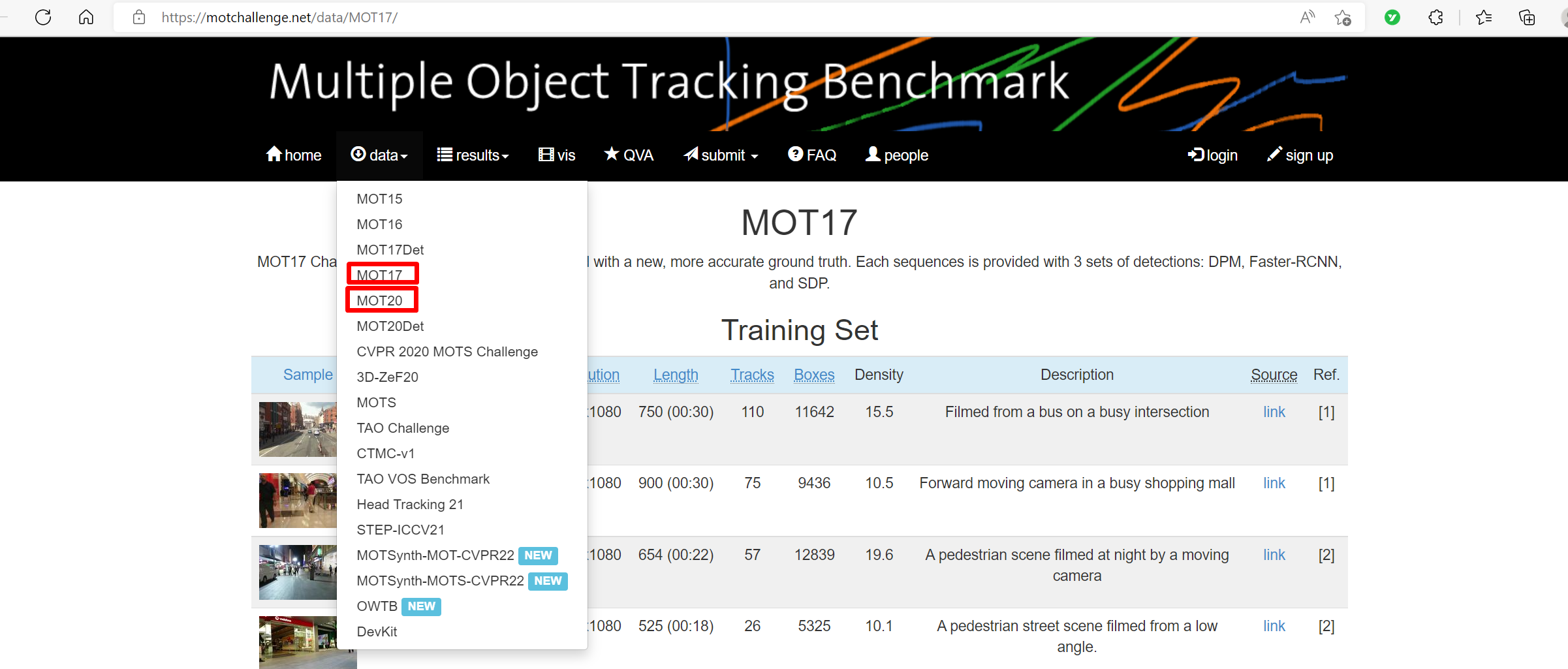
然后,点击"data",就可以看到MOT17和MOT20。
选择MOT17,然后就可以看到MOT17的网页。
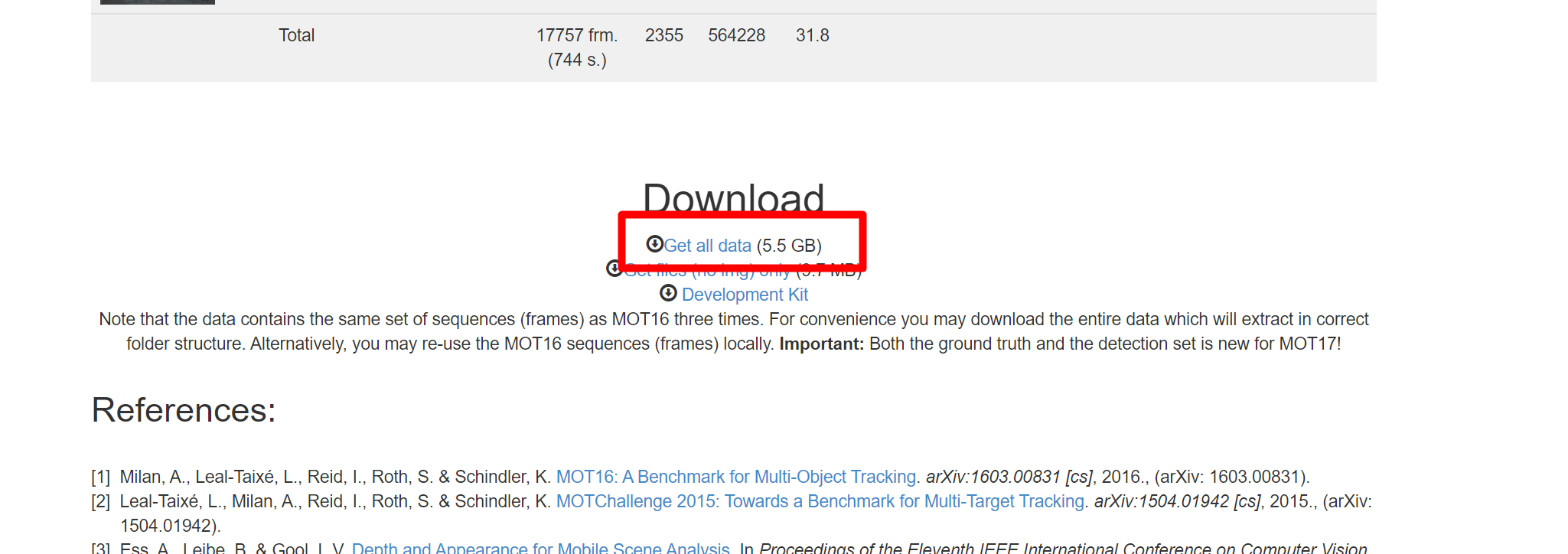
将网页下拉到最后就可以看到下载链接了。点击"Get all data",下载MOT17。
同理,选择MOT20下载MOT20数据集。
2、配置BoT-SORT环境
2.1、获取代码
链接:
https://github.com/NirAharon/BOT-SORT
将其下载下来。然后放到本地磁盘,解压。
2.2、创建虚拟环境
执行如下命令:
prism language-python
conda create -n botsort_env python=3.7
conda activate botsort_env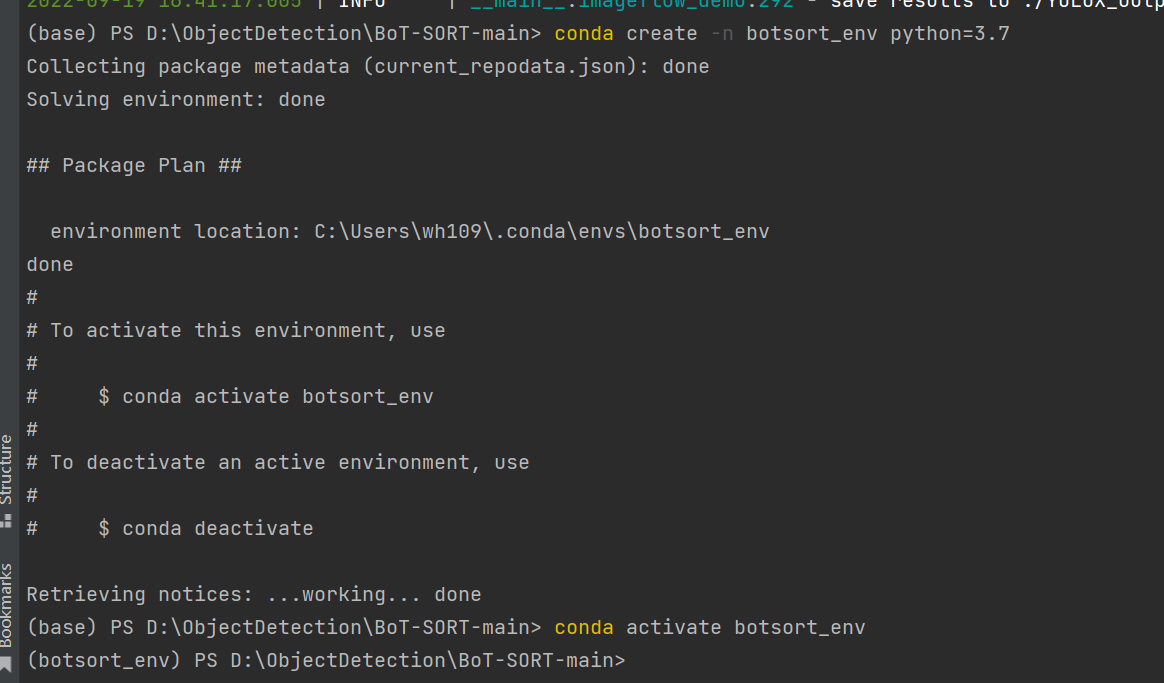
2.3、安装必要的包
第一种,进入BoT-SORT-main目录
执行
prism language-python
pip install -r requirements.txt安装requirements.txt所有的包,这样会安装多余的包。我通常采用另一种方式:单独安装每个包。
2.3.1、安装pytorch
执行命令:
prism language-python
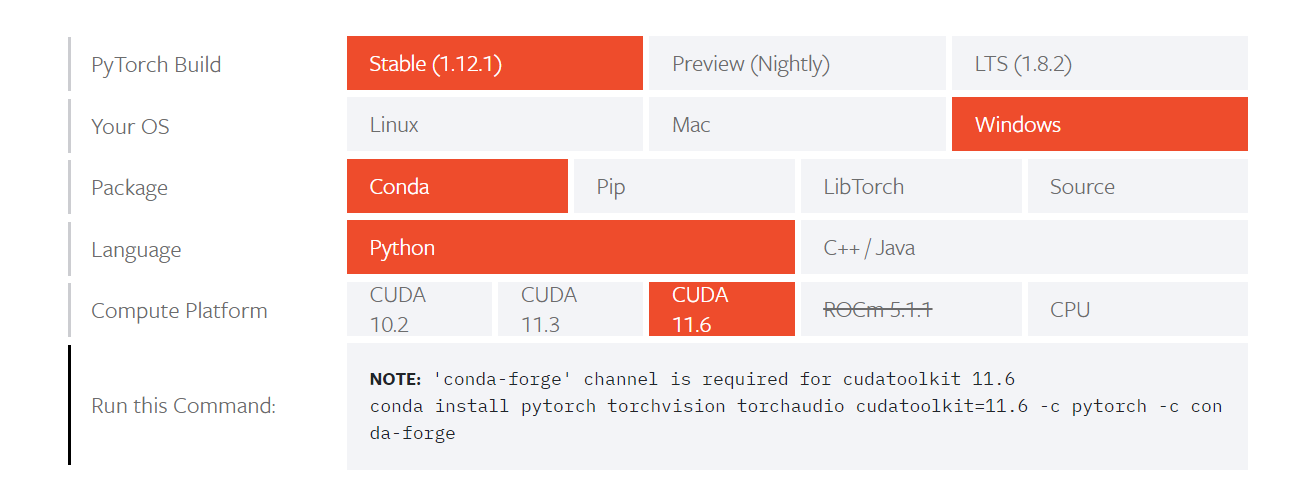
conda install pytorch torchvision torchaudio cudatoolkit=11.6 -c pytorch -c conda-forge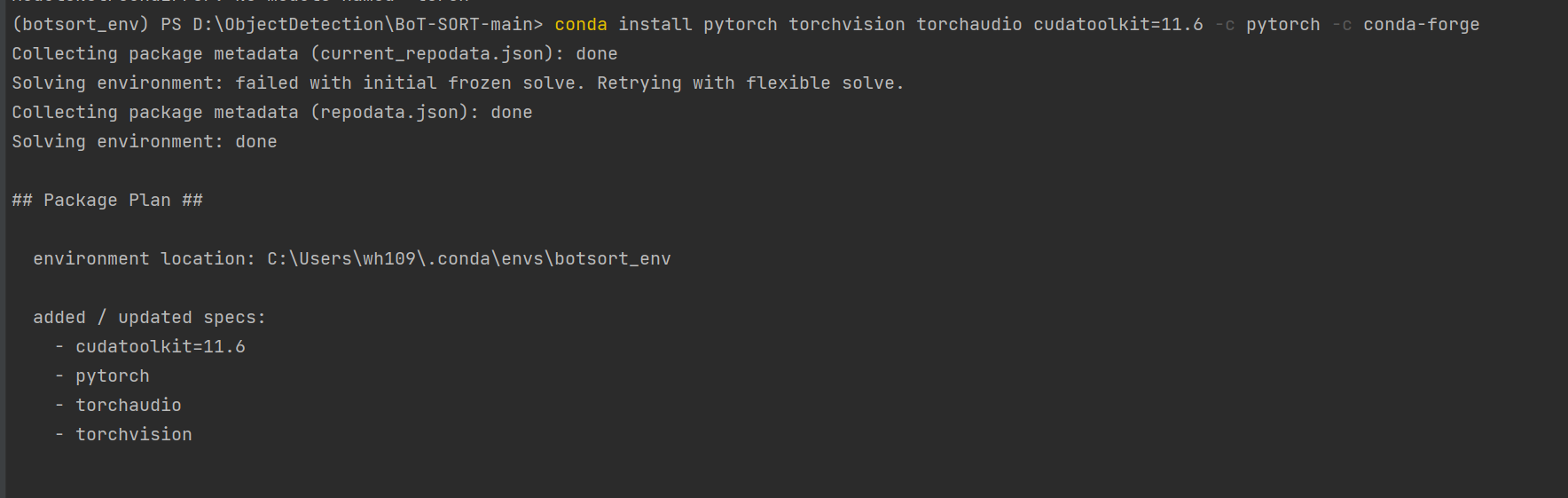
2.3.2、安装cython
prism language-python
pip install cython2.3.3、安装Cython-bbox
这里主要讲如何在Window下面安装:
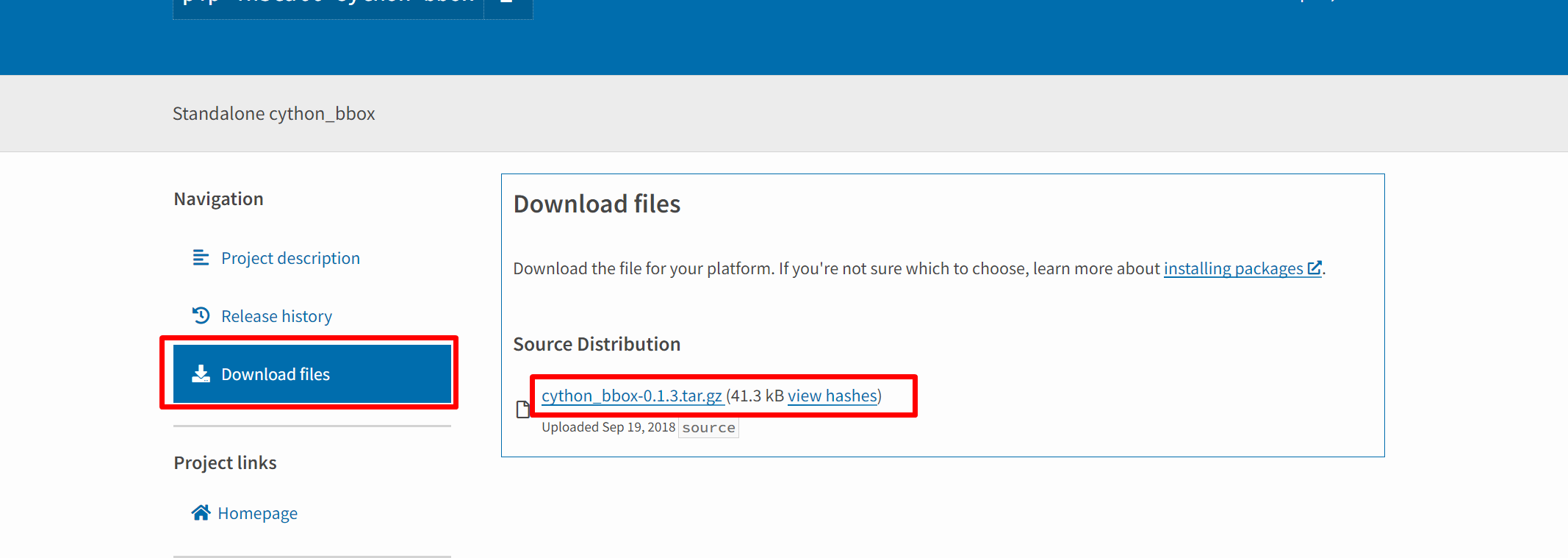
第一步:从网址https://pypi.org/project/cython-bbox/中下载cython-bbox,然后解压,可以看到dist文件夹。
第二步:解压后,在文件夹里找到setup.py,并把extra_compile_args=['-Wno-cpp'],修改为 extra_compile_args = {'gcc': ['/Qstd=c99']},如下图所示:
prism language-python
extra_compile_args = {'gcc':['/Qstd=c99']},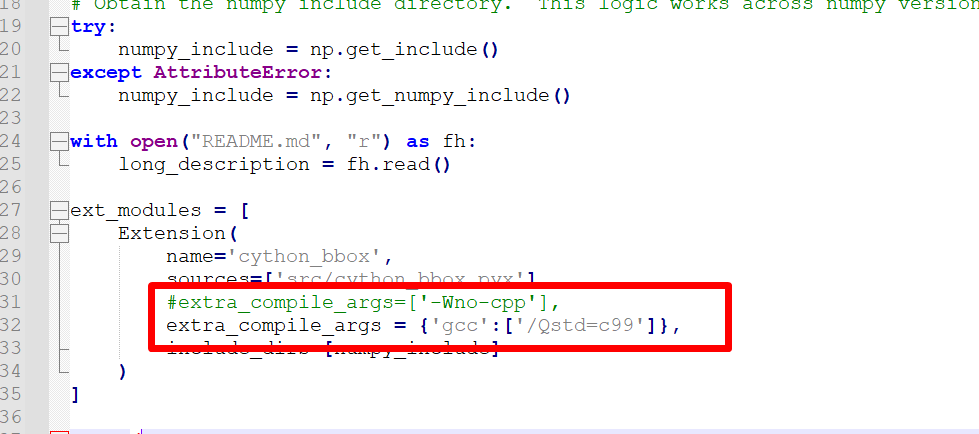
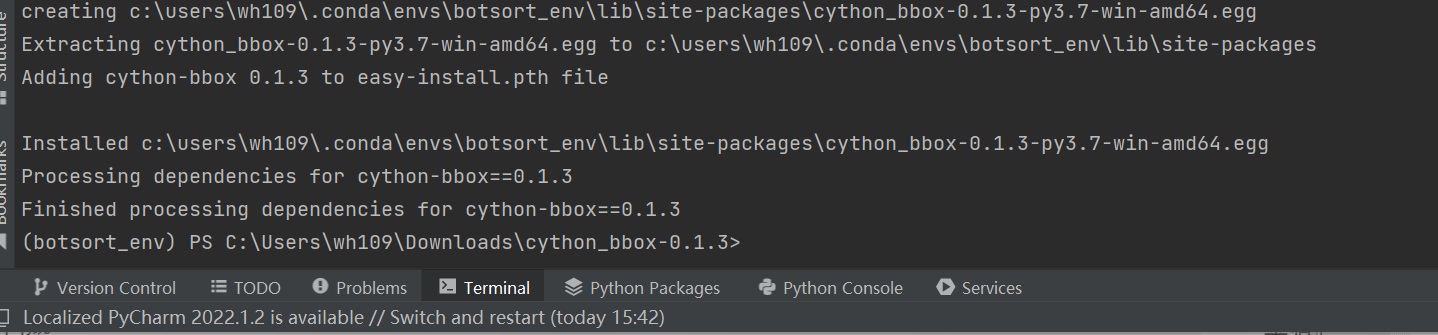
最后一步:在虚拟环境下,切换到cython_bbox-0.1.3缩在文件夹,输入命令:python setup.py build_ext install,当出现下图所示的结果,则代表cython-bbox安装成功。
2.3.4、安装faiss
参考:https://github.com/facebookresearch/faiss/blob/main/INSTALL.md
prism language-python
conda install -c conda-forge faiss-gpu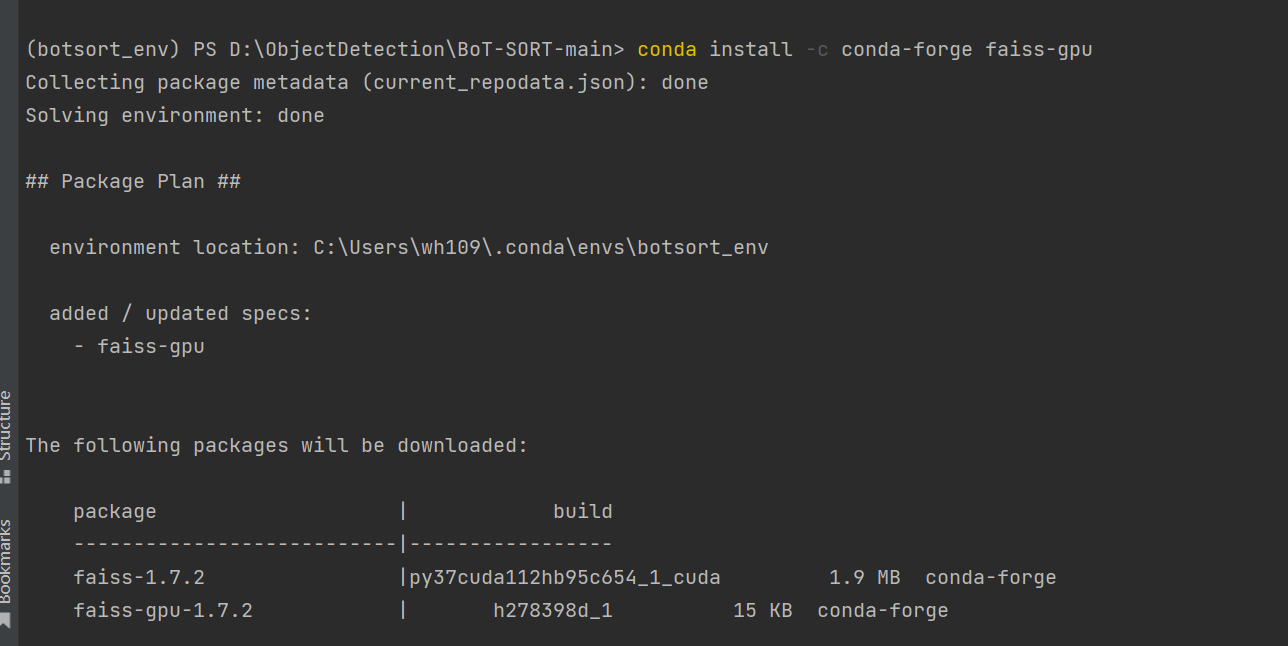
2.3.5、安装其他的包
prism language-python
pip install loguru
pip install thop
pip install tabulate
pip install six
pip install yacs
pip install termcolor
pip install tensorboard
pip install pycocotools
pip install lap把上面的安装包正确安装后就可以开始测试了。
3、训练
3.1、生成REID数据集
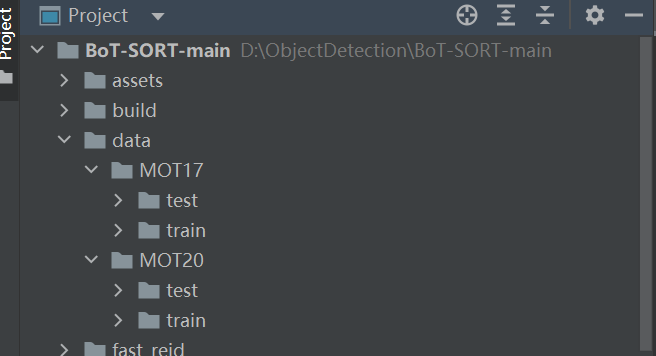
将下载好的数据集解压,放到data目录下,如下图:
执行命令:
prism language-python
# For MOT17
python fast_reid/datasets/generate_mot_patches.py --data_path <dataets_dir> --mot 17
# For MOT20
python fast_reid/datasets/generate_mot_patches.py --data_path <dataets_dir> --mot 20例如:
prism language-python
# For MOT20
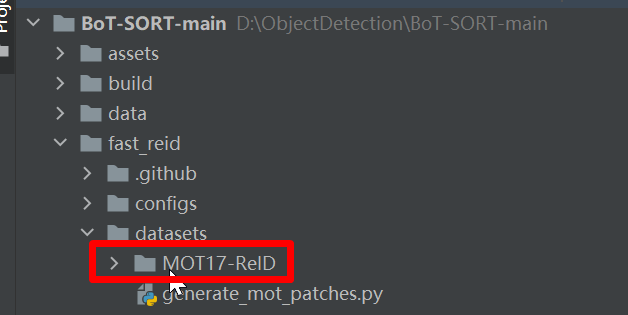
python fast_reid/datasets/generate_mot_patches.py --data_path data --mot 17等待完成后,就可以在"fast_reid/datasets"下面找到数据集,如下图:
3.2、预训练模型
3.2.1、ByteTrack预训练模型
- Standard models
| Model | MOTA | IDF1 | IDs | FPS |
|---|---|---|---|---|
bytetrack_x_mot17 [[google]](https://drive.google.com/file/d/1P4mY0Yyd3PPTybgZkjMYhFri88nTmJX5/view?usp=sharing), [[baidu(code:ic0i)]](https://pan.baidu.com/s/1OJKrcQa_JP9zofC6ZtGBpw) |
90.0 | 83.3 | 422 | 29.6 |
bytetrack_l_mot17 [[google]](https://drive.google.com/file/d/1XwfUuCBF4IgWBWK2H7oOhQgEj9Mrb3rz/view?usp=sharing), [[baidu(code:1cml)]](https://pan.baidu.com/s/1242adimKM6TYdeLU2qnuRA) |
88.7 | 80.7 | 460 | 43.7 |
bytetrack_m_mot17 [[google]](https://drive.google.com/file/d/11Zb0NN_Uu7JwUd9e6Nk8o2_EUfxWqsun/view?usp=sharing), [[baidu(code:u3m4)]](https://pan.baidu.com/s/1fKemO1uZfvNSLzJfURO4TQ) |
87.0 | 80.1 | 477 | 54.1 |
bytetrack_s_mot17 [[google]](https://drive.google.com/file/d/1uSmhXzyV1Zvb4TJJCzpsZOIcw7CCJLxj/view?usp=sharing), [[baidu(code:qflm)]](https://pan.baidu.com/s/1PiP1kQfgxAIrnGUbFP6Wfg) |
79.2 | 74.3 | 533 | 64.5 |
- Light models
| Model | MOTA | IDF1 | IDs | Params(M) | FLOPs(G) |
|---|---|---|---|---|---|
bytetrack_nano_mot17 [[google]](https://drive.google.com/file/d/1AoN2AxzVwOLM0gJ15bcwqZUpFjlDV1dX/view?usp=sharing), [[baidu(code:1ub8)]](https://pan.baidu.com/s/1dMxqBPP7lFNRZ3kFgDmWdw) |
69.0 | 66.3 | 531 | 0.90 | 3.99 |
bytetrack_tiny_mot17 [[google]](https://drive.google.com/file/d/1LFAl14sql2Q5Y9aNFsX_OqsnIzUD_1ju/view?usp=sharing), [[baidu(code:cr8i)]](https://pan.baidu.com/s/1jgIqisPSDw98HJh8hqhM5w) |
77.1 | 71.5 | 519 | 5.03 | 24.45 |
3.2.2、REID预训练模型
MOT17-SBS-S50网盘链接:
https://drive.google.com/file/d/1QZFWpoa80rqo7O-HXmlss8J8CnS7IUsN/view?usp=sharing
或者下载我上传到CSDN的模型:
https://download.csdn.net/download/hhhhhhhhhhwwwwwwwwww/86566078
将预训练模型统一放到pretrained文件夹
3.3、开始训练
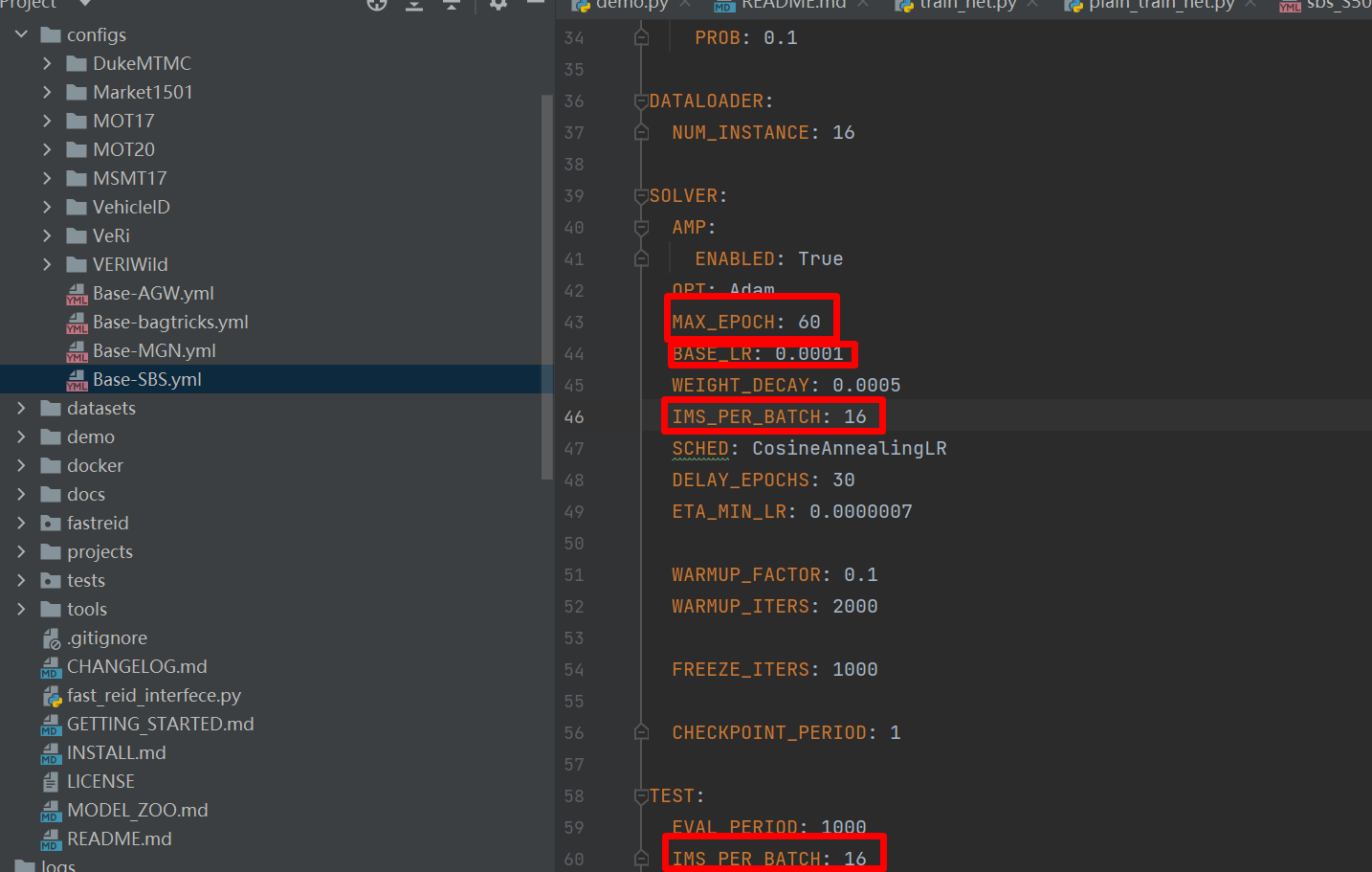
修改配置文件Base-SBS.yml里面的参数,根据自己的显卡大小调整BatchSize和学习率。
然后执行如下命令开始训练。
prism language-python
# For training MOT17
python fast_reid/tools/train_net.py --config-file ./fast_reid/configs/MOT17/sbs_S50.yml MODEL.DEVICE "cuda:0"
# For training MOT20
python fast_reid/tools/train_net.py --config-file ./fast_reid/configs/MOT20/sbs_S50.yml MODEL.DEVICE "cuda:0"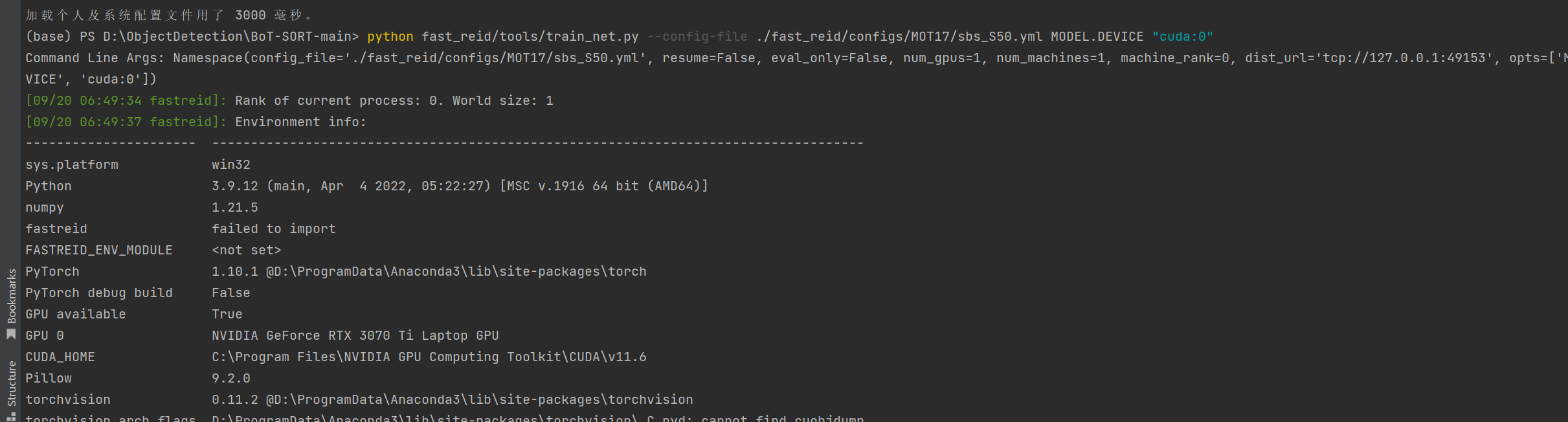
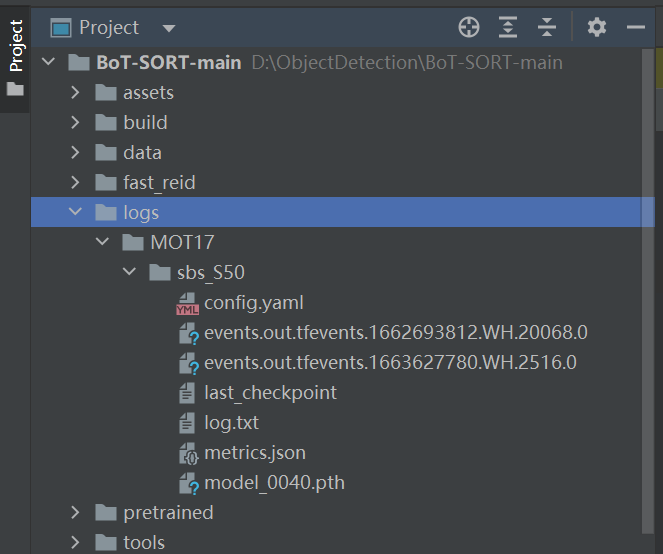
看到如下画面就表示开始训练了。在logs文件夹下面可以看到训练好的模型。
4、如何更改FASTREID的BackBone?

按照上图打开init.py可以看到fastreid支持的backbone。下面我们开始修改backbone,比如我们想改一个小一点的resnet18。
首先,将backbone的那么修改为build_resnet_backbone,
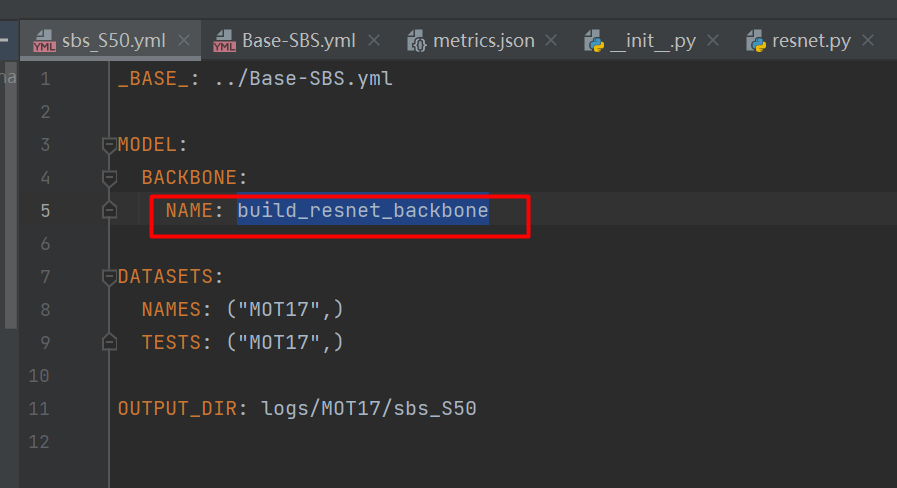
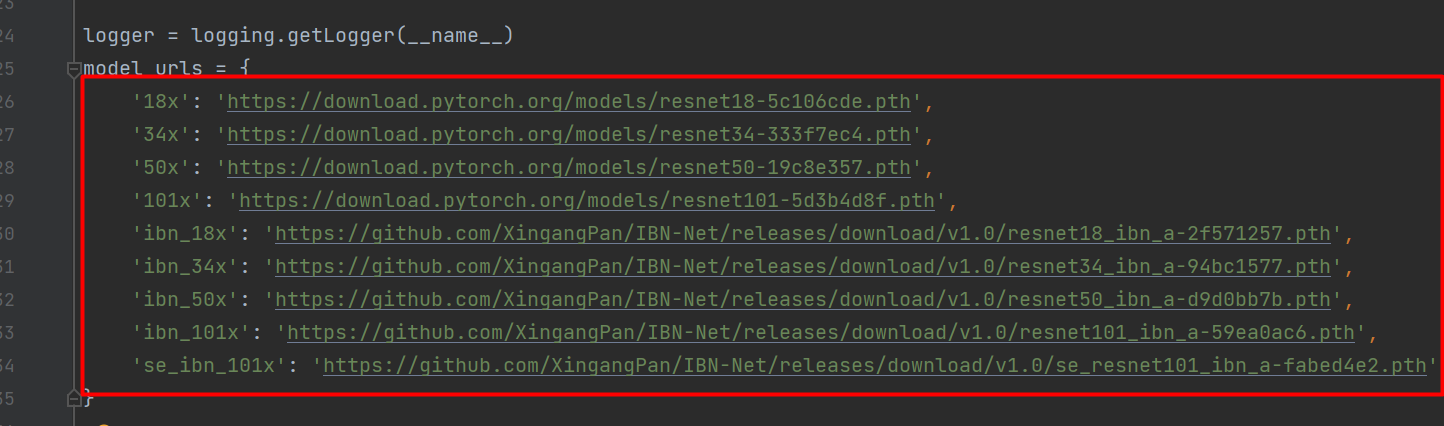
然后,再添加DEPTH字段,将DEPTH字段的值设置为18x,这个值可以在fastreid->modeling->backbones->resnet.py中找到。
5、测试
打开tools/track.py文件,修改里面的参数,需要修改的参数。
prism language-python
parser.add_argument("--fast-reid-config", dest="fast_reid_config", default=r"fast_reid/configs/MOT17/sbs_S50.yml", type=str, help="reid config file path")
parser.add_argument("--fast-reid-weights", dest="fast_reid_weights", default=r"pretrained/mot17_sbs_S50.pth", type=str, help="reid config file path")将这两个参数按照本地的实际参数修改。
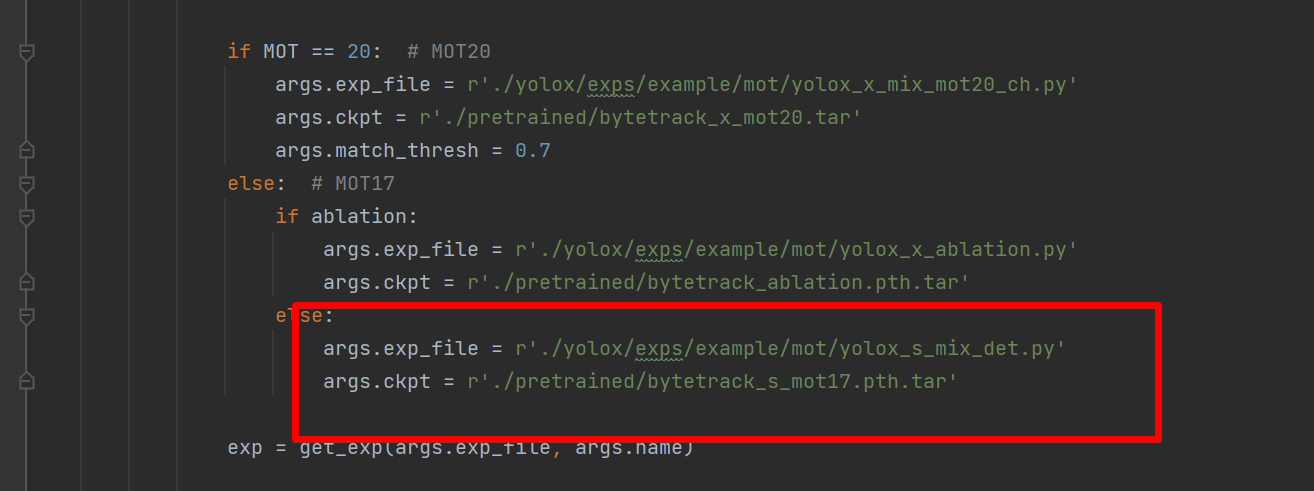
跟踪模型默认是byteTrack的bytetrack_x_mot17.pth.tar文件,我们可以根据任务调整。
- Test on MOT17
prism language-shell
cd <BoT-SORT_dir>
python tools/track.py <dataets_dir/MOT17> --default-parameters --with-reid --benchmark "MOT17" --eval "test" --fp16 --fuse
python tools/interpolation.py --txt_path <path_to_track_result>- Test on MOT20
prism language-shell
cd <BoT-SORT_dir>
python tools/track.py <dataets_dir/MOT20> --default-parameters --with-reid --benchmark "MOT20" --eval "test" --fp16 --fuse
python tools/interpolation.py --txt_path <path_to_track_result>例如:
prism language-python
python tools/track.py data/MOT17 --default-parameters --with-reid --benchmark "MOT17" --eval "test" --fp16 --fuse等待测试完成。
然后修改interpolation.py,如下图的位置:
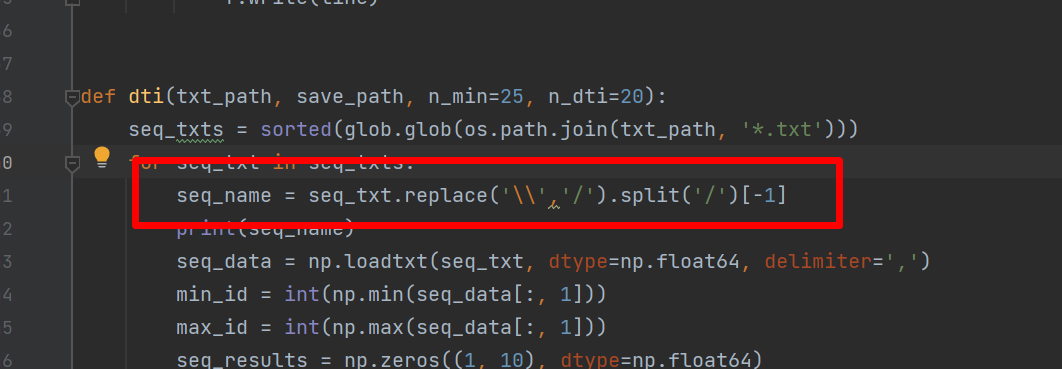
然后执行命令:
prism language-python
python tools/interpolation.py --txt_path ./YOLOX_outputs/yolox_s_mix_det/track_results/5.1、测试视频
prism language-python
python tools/demo.py video --path <path_to_video> -f yolox/exps/example/mot/yolox_x_mix_det.py -c pretrained/bytetrack_x_mot17.pth.tar --with-reid --fuse-score --fp16 --fuse --save_result例如:
prism language-python
python tools/demo.py video --path 1.mp4 -f yolox/exps/example/mot/yolox_x_mix_det.py -c pretrained/bytetrack_x_mot17.pth.tar --with-reid --fuse-score --fp16 --fuse --save_result5.2、测试摄像头
prism language-python
python tools/demo.py webcam -f yolox/exps/example/mot/yolox_x_mix_det.py -c pretrained/bytetrack_x_mot17.pth.tar --with-reid --fuse-score --fp16 --fuse --save_result5.3、多类别测试
多类别是基于yolov7做的,使用yolov7检测出物体的box,然后输入到bot做跟踪。
prism language-python
python tools/mc_demo_yolov7.py --weights pretrained/yolov7-w6.pt --source 3.mp4 --fuse-score --agnostic-nms --with-reid --view-imgmc_demo_yolov7.py的代码:
prism language-python
import argparse
import time
from pathlib import Path
import sys
import cv2
import torch
import torch.backends.cudnn as cudnn
from numpy import random
from yolov7.models.experimental import attempt_load
from yolov7.utils.datasets import LoadStreams, LoadImages
from yolov7.utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, \
apply_classifier, \
scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
from yolov7.utils.plots import plot_one_box
from yolov7.utils.torch_utils import select_device, load_classifier, time_synchronized, TracedModel
from tracker.mc_bot_sort import BoTSORT
from tracker.tracking_utils.timer import Timer
sys.path.insert(0, './yolov7')
sys.path.append('.')
def write_results(filename, results):
save_format = '{frame},{id},{x1},{y1},{w},{h},{s},-1,-1,-1\n'
with open(filename, 'w') as f:
for frame_id, tlwhs, track_ids, scores in results:
for tlwh, track_id, score in zip(tlwhs, track_ids, scores):
if track_id < 0:
continue
x1, y1, w, h = tlwh
line = save_format.format(frame=frame_id, id=track_id, x1=round(x1, 1), y1=round(y1, 1), w=round(w, 1),
h=round(h, 1), s=round(score, 2))
f.write(line)
print('save results to {}'.format(filename))
def detect(save_img=False):
source, weights, view_img, save_txt, imgsz, trace = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size, opt.trace
save_img = not opt.nosave and not source.endswith('.txt') # save inference images
webcam = source.isnumeric() or source.endswith('.txt') or source.lower().startswith(
('rtsp://', 'rtmp://', 'http://', 'https://'))
# Directories
save_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run
(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Initialize
set_logging()
device = select_device(opt.device)
half = device.type != 'cpu' # half precision only supported on CUDA
# Load model
model = attempt_load(weights, map_location=device) # load FP32 model
stride = int(model.stride.max()) # model stride
imgsz = check_img_size(imgsz, s=stride) # check img_size
if trace:
model = TracedModel(model, device, opt.img_size)
if half:
model.half() # to FP16
# Second-stage classifier
classify = False
if classify:
modelc = load_classifier(name='resnet101', n=2) # initialize
modelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']).to(device).eval()
# Set Dataloader
vid_path, vid_writer = None, None
if webcam:
view_img = check_imshow()
cudnn.benchmark = True # set True to speed up constant image size inference
dataset = LoadStreams(source, img_size=imgsz, stride=stride)
else:
dataset = LoadImages(source, img_size=imgsz, stride=stride)
# Get names and colors
names = model.module.names if hasattr(model, 'module') else model.names
colors = [[random.randint(0, 255) for _ in range(3)] for _ in range(100)]
# Create tracker
tracker = BoTSORT(opt, frame_rate=30.0)
# Run inference
if device.type != 'cpu':
model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
t0 = time.time()
for path, img, im0s, vid_cap in dataset:
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
# Inference
t1 = time_synchronized()
pred = model(img, augment=opt.augment)[0]
# Apply NMS
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)
t2 = time_synchronized()
# Apply Classifier
if classify:
pred = apply_classifier(pred, modelc, img, im0s)
# Process detections
results = []
for i, det in enumerate(pred): # detections per image
if webcam: # batch_size >= 1
p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
else:
p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
# Run tracker
detections = []
if len(det):
boxes = scale_coords(img.shape[2:], det[:, :4], im0.shape)
boxes = boxes.cpu().numpy()
detections = det.cpu().numpy()
detections[:, :4] = boxes
online_targets = tracker.update(detections, im0)
online_tlwhs = []
online_ids = []
online_scores = []
online_cls = []
for t in online_targets:
tlwh = t.tlwh
tlbr = t.tlbr
tid = t.track_id
tcls = t.cls
if tlwh[2] * tlwh[3] > opt.min_box_area:
online_tlwhs.append(tlwh)
online_ids.append(tid)
online_scores.append(t.score)
online_cls.append(t.cls)
# save results
results.append(
f"{i + 1},{tid},{tlwh[0]:.2f},{tlwh[1]:.2f},{tlwh[2]:.2f},{tlwh[3]:.2f},{t.score:.2f},-1,-1,-1\n"
)
if save_img or view_img: # Add bbox to image
if opt.hide_labels_name:
label = f'{tid}, {int(tcls)}'
else:
label = f'{tid}, {names[int(tcls)]}'
plot_one_box(tlbr, im0, label=label, color=colors[int(tid) % len(colors)], line_thickness=2)
p = Path(p) # to Path
save_path = str(save_dir / p.name) # img.jpg
# Print time (inference + NMS)
# print(f'{s}Done. ({t2 - t1:.3f}s)')
# Stream results
if view_img:
cv2.imshow('BoT-SORT', im0)
cv2.waitKey(1) # 1 millisecond
# Save results (image with detections)
if save_img:
if dataset.mode == 'image':
cv2.imwrite(save_path, im0)
else: # 'video' or 'stream'
if vid_path != save_path: # new video
vid_path = save_path
if isinstance(vid_writer, cv2.VideoWriter):
vid_writer.release() # release previous video writer
if vid_cap: # video
fps = vid_cap.get(cv2.CAP_PROP_FPS)
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
else: # stream
fps, w, h = 30, im0.shape[1], im0.shape[0]
save_path += '.mp4'
vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
vid_writer.write(im0)
if save_txt or save_img:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
# print(f"Results saved to {save_dir}{s}")
print(f'Done. ({time.time() - t0:.3f}s)')
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--weights', nargs='+', type=str, default='yolov7.pt', help='model.pt path(s)')
parser.add_argument('--source', type=str, default='inference/images', help='source') # file/folder, 0 for webcam
parser.add_argument('--img-size', type=int, default=1920, help='inference size (pixels)')
parser.add_argument('--conf-thres', type=float, default=0.09, help='object confidence threshold')
parser.add_argument('--iou-thres', type=float, default=0.7, help='IOU threshold for NMS')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='display results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--update', action='store_true', help='update all models')
parser.add_argument('--project', default='runs/detect', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--trace', action='store_true', help='trace model')
parser.add_argument('--hide-labels-name', default=False, action='store_true', help='hide labels')
# tracking args
parser.add_argument("--track_high_thresh", type=float, default=0.3, help="tracking confidence threshold")
parser.add_argument("--track_low_thresh", default=0.05, type=float, help="lowest detection threshold")
parser.add_argument("--new_track_thresh", default=0.4, type=float, help="new track thresh")
parser.add_argument("--track_buffer", type=int, default=30, help="the frames for keep lost tracks")
parser.add_argument("--match_thresh", type=float, default=0.7, help="matching threshold for tracking")
parser.add_argument("--aspect_ratio_thresh", type=float, default=1.6,
help="threshold for filtering out boxes of which aspect ratio are above the given value.")
parser.add_argument('--min_box_area', type=float, default=10, help='filter out tiny boxes')
parser.add_argument("--fuse-score", dest="mot20", default=False, action="store_true",
help="fuse score and iou for association")
# CMC
parser.add_argument("--cmc-method", default="orb", type=str, help="cmc method: files (Vidstab GMC) | orb | ecc")
# ReID
parser.add_argument("--with-reid", dest="with_reid", default=False, action="store_true", help="with ReID module.")
parser.add_argument("--fast-reid-config", dest="fast_reid_config", default=r"fast_reid/configs/MOT17/sbs_S50.yml",
type=str, help="reid config file path")
parser.add_argument("--fast-reid-weights", dest="fast_reid_weights", default=r"pretrained/mot17_sbs_S50.pth",
type=str, help="reid config file path")
parser.add_argument('--proximity_thresh', type=float, default=0.5,
help='threshold for rejecting low overlap reid matches')
parser.add_argument('--appearance_thresh', type=float, default=0.25,
help='threshold for rejecting low appearance similarity reid matches')
opt = parser.parse_args()
opt.jde = False
opt.ablation = False
print(opt)
# check_requirements(exclude=('pycocotools', 'thop'))
with torch.no_grad():
if opt.update: # update all models (to fix SourceChangeWarning)
for opt.weights in ['yolov7.pt']:
detect()
strip_optimizer(opt.weights)
else:
detect() ===========================
【来源: CSDN】
【作者: AI浩】
【原文链接】 https://wanghao.blog.csdn.net/article/details/126945400
声明:转载此文是出于传递更多信息之目的。若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本网联系,我们将及时更正、删除,谢谢。